飞控安装¶
飞行控制器应尽可能安装在靠近无人机重心位置(centre-of-gravity, CoG),顶部朝上,并使 航向标记箭头 指向飞行器前方。振动隔离通常是必需的,并遵循制造商的建议选择减震器。
安装方向¶
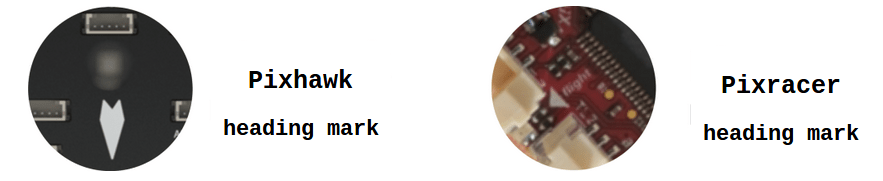
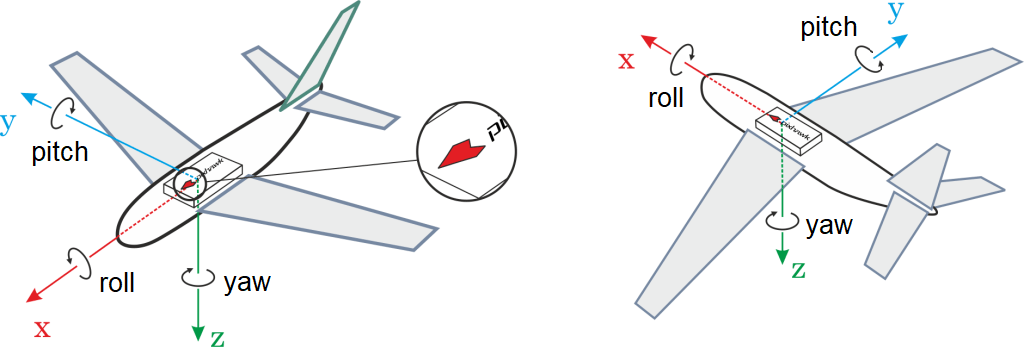
几乎所有飞行控制器都有一个 航向标记箭头(如下图所示)。控制器应放置在机架上,朝上,方向使箭头指向飞行器前方(包括固定翼、多旋翼、垂直起降飞机、地面车辆等)。
Note
如果由于物理限制,无法将控制器以推荐/默认的方向安装,你需要将自动驾驶仪软件配置为你实际使用的方向,请参考飞行控制器方向。
安装位置¶
飞行控制器应尽可能安装在靠近无人机重心(CoG)位置。如果你无法将飞行控制器安装在这个位置,那么你应该配置以下参数,以设置相对于 CoG 的偏移:
注意,如果你不设置这些偏移,那么EKF2估计的是飞行控制器安装位置的位置/速度,而不是CoG位置。这可能导致不良振荡,具体取决于IMU与CoG的距离。
Details
为了理解不设置这些偏移的影响,假设飞行控制器(IMU)安装于CoG前方,无人机以定点模式(Position)飞行,且围绕CoG前倾时,有前倾俯仰运动。高度估计会下降,因为IMU实际上已经下降了。作为反作用,高度控制器会提供更多推力来补偿。振幅取决于IMU与CoG的距离,虽然可能微不足道,但仍然是不断施加的一种不必要的控制。如果设置了偏移量,纯俯仰运动不会改变高度估计,因此寄生修正会减少。
振动隔离¶
飞行控制器内置的加速度计和陀螺仪对振动非常敏感。有些飞行控制器内置了减震功能,比如有带有减震泡棉,可以用来将飞行控制器与无人机震动隔离。你应该使用飞行控制器文档中推荐的减震安装策略。
 减震泡棉
减震泡棉
Tip
使用Flight Review进行日志分析 > 振动分析 说明了如何测试振动水平是否可接受,而振动隔离则提供了减震问题的可能解决方案。